多普勒雷达
本教程的雷达基础部分包括以下子主题:
主页术语测量多普勒雷达FMCW雷达乐队雷达范围气象雷达地面雷达范围和分辨率范围的计算器
多普勒雷达结构简单,利用连续波进行信号传输。因此多普勒雷达也被称为连续波雷达。这种雷达基于以下原理。固定目标返回信号即回波的频率保持与发射波相同,而运动目标返回信号的频率将根据多普勒频率进行移位。雷达通过测量发射频率和反射频率的差值来提取目标的相对速度。
由于连续形式的CW发射,基本不间断多普勒雷达对距离测量无效。这一概念用于下面描述的警察雷达,用于跟踪快速移动的车辆的速度。它用于爬升速度计,也用于测量飞机的速度。

如图所示,当目标固定时,发射波数与反射接收波数相同。如果目标在移动,则反射波的数量根据目标向雷达移动或远离雷达移动而减少或增加。
让我们假设目标正朝雷达方向移动。在这种情况下,雷达和目标之间的距离是减小的,这取决于运动目标速度的大小。雷达在返回的反射波的频率上有明显的偏移,称为多普勒频移。当发射波以GHz为单位时,该多普勒频移约为1KHz量级。根据这一频率变化,可以确定目标的速度,也可以找到目标的运动方向。下面用多普勒雷达方程描述了这一点。
多普勒频移fd= 2* f0/c = dR/dt = 2*(dR/dt)/λ0= 2 * v * cosθ/λ0
式中,v为目标夹角θ相对于位置矢量(R)的相对速度。
当目标在雷达方向上运动时,θ角与信号频率f的夹角在0 ~ 90度之间0会增加fd.当目标远离雷达时,θ与f的夹角在90 ~ 180度之间0会减少fd.当速度垂直时,f没有变化0和fd是零。
在多普勒雷达中,距离率可以通过测量多普勒频移和极性来确定。
基于多普勒的警用雷达
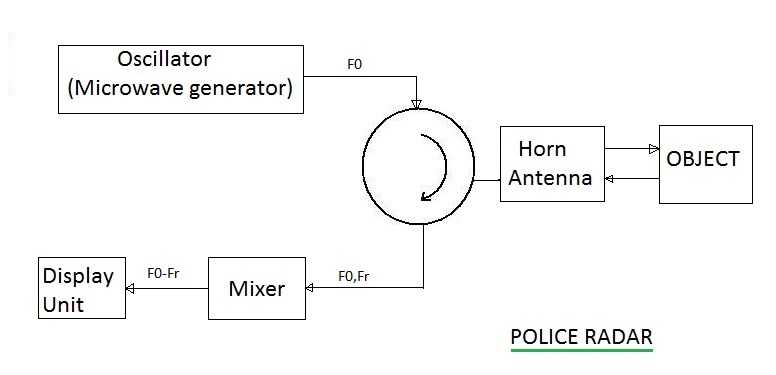
图2描述了警用雷达中使用的模块。它用于检测和测量移动车辆的速度。如图所示,采用微波信号发生器作为发射机。本文采用基于冈氏二极管的振荡器来产生微波信号。微波信号通过喇叭天线通过射频环行器传输。发射信号的泄漏部分用来与反射信号进行比较。RF混频器产生这两个输入信号频率的和和差。由于多普勒频移,和分量被忽略,差分分量被使用。这种类型的雷达被称为警察雷达.经过处理的多普勒频率被馈送到雷达瞄准镜或显示单元。这个显示单元提供移动车辆的速度。
下面的公式可用于警用雷达中计算车辆的速度。
速度(英里/小时)= 0.26 *(多普勒频移,Hz)/(微波频率,GHz)


雷达相关连结
雷达教程
多普勒雷达
FMCW雷达
雷达的乐队
雷达范围
气象雷达
探地雷达系统
雷达距离和分辨率
雷达计算器
以下是有用的雷达计算器计算雷达距离,雷达PRF,雷达分辨率等。
雷达距离计算器
雷达PRF与距离
雷达距离分辨率