线跟随机器人使用Arduino |代码,电路,组件,工作
本页介绍了跟随线机器人使用Arduino的原理,介绍了跟随线机器人的电路工作操作、组件和跟随线机器人的代码。
简介:
以下项目已开发使用arduino UNO板和其他组件如下所示。它采用红外传感器、电机、车轮和电机驱动卡。
跟随线机器人组件
以下是直线跟随机器人组件列表。
•Arduino Uno板
•红外传感器(2个)
•直流电机(2台)
•单个9V电池或1.5V系列(6个)
•开/关开关
•汽车驾驶卡(L298N)
跟随线机器人电路
以下是跟随线机器人的完整电路图。开关可以与电池串联,然后再为线路跟随机器人的板和其他部件供电。

如图-1所示,机器人由arduino板组成。当红外传感器发现它下面的黑线时,机器人就会停止,当红外传感器发现白色或非黑色时,机器人就会运行。
跟随线机器人工作

红外传感器用于探测障碍物。这个机器人使用红外传感器。这个跟随线机器人通过检测白色背景来跟随黑线,当它发现黑色背景时停止。下面的视频演示了同样的方法。
红外传感器根据障碍物的存在提供0或1的输出。在这种情况下,它提供了基于黑色或非黑色(即白色)颜色的输出。当有黑色时,输出为1,根据arduino代码,它停止电机驱动器输出,连续电机都是OFF。当红外传感器前有白色时,输出为零,按代码产生电机驱动输出,电机连续打开,机器人由于车轮运动向前移动。
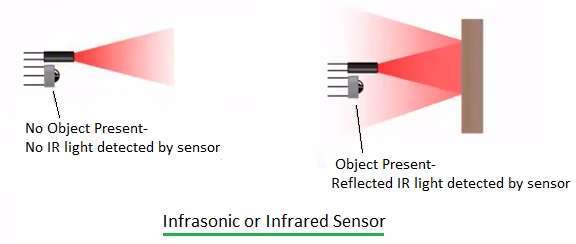
请参考红外传感器基础>>用于红外传感器的工作操作。
跟随线机器人代码
以下是使用arduino IDE编译并上传到arduino板的arduino代码。
/ *——definning输入* /
#定义LS 2左传感器
#定义RS 3 //右传感器
/ *——definning输出* /
#define LM1 4 //左电机
#define LM2 5 //左电机
#define rm16 6 //右电机
#define RM2 7 //右电机
无效的设置()
{
pinMode (LS、输入);
pinMode (RS,输入);
pinMode (LM1、输出);
pinMode (LM2、输出);
pinMode(1、输出);
pinMode (RM2、输出);
}
无效循环()
{
if(!(digitalRead(LS)) && !(digitalRead(RS))) // Move Forward (digitalRead(LS) && digitalRead(RS))
{
digitalWrite (LM1、高);
digitalWrite (LM2、低);
digitalWrite(1、高);
digitalWrite (RM2、低);
}
if(!(digitalRead(LS)) && digitalRead(RS)) //右转
{
digitalWrite (LM1、低);
digitalWrite (LM2、低);
digitalWrite(1、高);
digitalWrite (RM2、低);
}
if(digitalRead(LS) && !(digitalRead(RS))) //左转
{
digitalWrite (LM1、高);
digitalWrite (LM2、低);
digitalWrite(1、低);
digitalWrite (RM2、低);
}
if(digitalRead(LS) && digitalRead(RS)) // stop !(digitalRead(LS)) && !(digitalRead(RS))
{
digitalWrite (LM1、低);
digitalWrite (LM2、低);
digitalWrite(1、低);
digitalWrite (RM2、低);
}
}
跟随线机器人视频
如视频所示,可以剪下黑色图表纸,粘贴在白色图表上进行演示。
结论:在这个应用笔记中,我们看到了使用arduino和IR传感器的跟随线机器人。Arduino板也用于接口不同类型的传感器应用。arduino接口的典型传感器有心率传感器、声音传感器、陀螺传感器、LDR传感器、GPS传感器、颜色传感器、pH传感器等。
物联网系统芯片教程相关链接
本教程的IoT(物联网)部分涵盖以下子主题:
主要的教程物联网部分物联网的文章移动物联网组件传感器印度公司天线类型无线技术物联网收发器SoC